Biohybrid and Organic Robotics Group
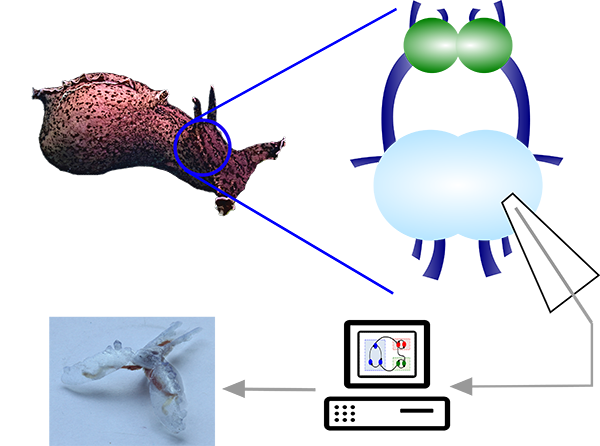
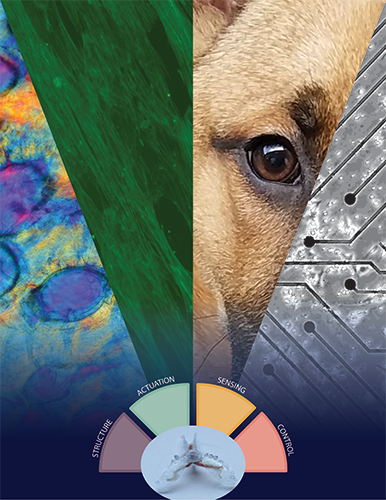
Animals have long served as an inspiration for robotics. However, many of the mechanical properties, physical capabilities, and the behavioral flexibility seen in animals have yet to be achieved in robotic platforms. Towards addressing this gap, research in the CMU B.O.R.G focuses on the use of organic materials as structures, actuators, sensors, and controllers towards the development of biohybrid and organic robots. The research group’s long-term goal is to develop completely organic, autonomous robots with programmable neural circuits. Such robotic systems will have future applications in medicine, search and rescue, and environmental monitoring.